20 июля 2022, 18:53
Источник  knews.kg
Комментарии
knews.kg
Комментарии
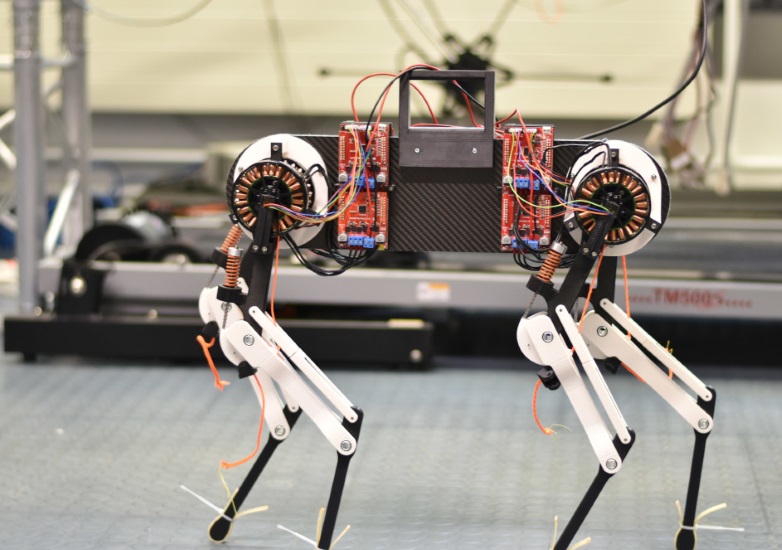
Чтобы изучить, как детеныши животных учатся ходить, немецкие исследователи разработали четвероногого робота Морти размером с собаку. Благодаря виртуальному спинному мозгу, который сравнивал модельные данные с информацией от датчика стопы и оптимизировал походку робота, Морти научился ходить всего за час. Статья опубликована в журнале Nature Machine Intelligence, пишут СМИ.
Новорожденные жирафы или жеребята должны как можно быстрее научиться ходить. Животные рождаются с нейронами спинного мозга, координирующими работу их мышц. Однако обучение движению требует некоторого времени. Исследователи из Института интеллектуальных систем Макса Планка сконструировали четвероногого робота размером с собаку, чтобы понять, как животные учатся ходить.
"Как инженеры и робототехники мы искали ответ, создавая робота, который обладает рефлексами как у животных и учится на ошибках", — говорит соавтор исследования Феликс Рупперт.
Робот, получивший имя Морти, научился ходить всего за час. Алгоритм байесовской оптимизации направлял его обучение — информация от датчика стопы сопоставлялась с данными из смоделированного виртуального спинного мозга. Робот учился ходить, постоянно сравнивая отправленную и ожидаемую информацию от датчиков, запуская рефлекторные циклы и адаптируя свои модели управления двигателем. Робот оптимизировал свои движения быстрее, чем животное. Если он спотыкается, алгоритм обучения менял длину и скорость шага. В этой структуре виртуальный спинной мозг не имел явных знаний о конструкции ноги робота.
Алгоритм обучения адаптирует параметры управления центрального генератора паттернов. У людей и животных эти центральные генераторы паттернов представляют собой сети нейронов в спинном мозге, которые производят периодические мышечные сокращения без участия головного мозга. Когда молодое животное ходит по идеально плоской поверхности, их может быть достаточно для управления сигналами движения от спинного мозга. Однако небольшая неровность на земле меняет походку. Рефлексы включаются и регулируют движения, чтобы животное не упало. Однако если животное не перестает спотыкаться, несмотря на активные рефлексы, то модели движения необходимо переучивать.
Компьютер Морти потреблял всего пять ватт энергии в процессе ходьбы. Промышленные четвероногие роботы известных производителей, которые научились работать с помощью сложных контроллеров, гораздо более энергоемки. Их контроллеры кодируются со знанием точной массы и геометрии тела робота. Обычно они потребляют от нескольких десятков до нескольких сотен ватт мощности.



{kind=link}